Opis modułów programowych
Użytkownik uzyskuje dostęp do systemu poprzez przeglądarkę internetową z wyłączeniem Internet Explorer. Każdy użytkownik systemu, po autoryzacji przez stronę WWW (dla jednego użytkownika może być zdefiniowanych kilka kont z różnymi uprawnieniami) może sprawdzić dane jednego lub kilku pojazdów z floty oraz ich aktualną lokalizację.
Wszelkie informacje dotyczące lokalizacji pojazdów są rejestrowane w bazie danych systemu. Zarówno bieżąca pozycja, jak i historia tras monitorowanych obiektów wyświetlana jest na wielowarstwowej mapie cyfrowej.
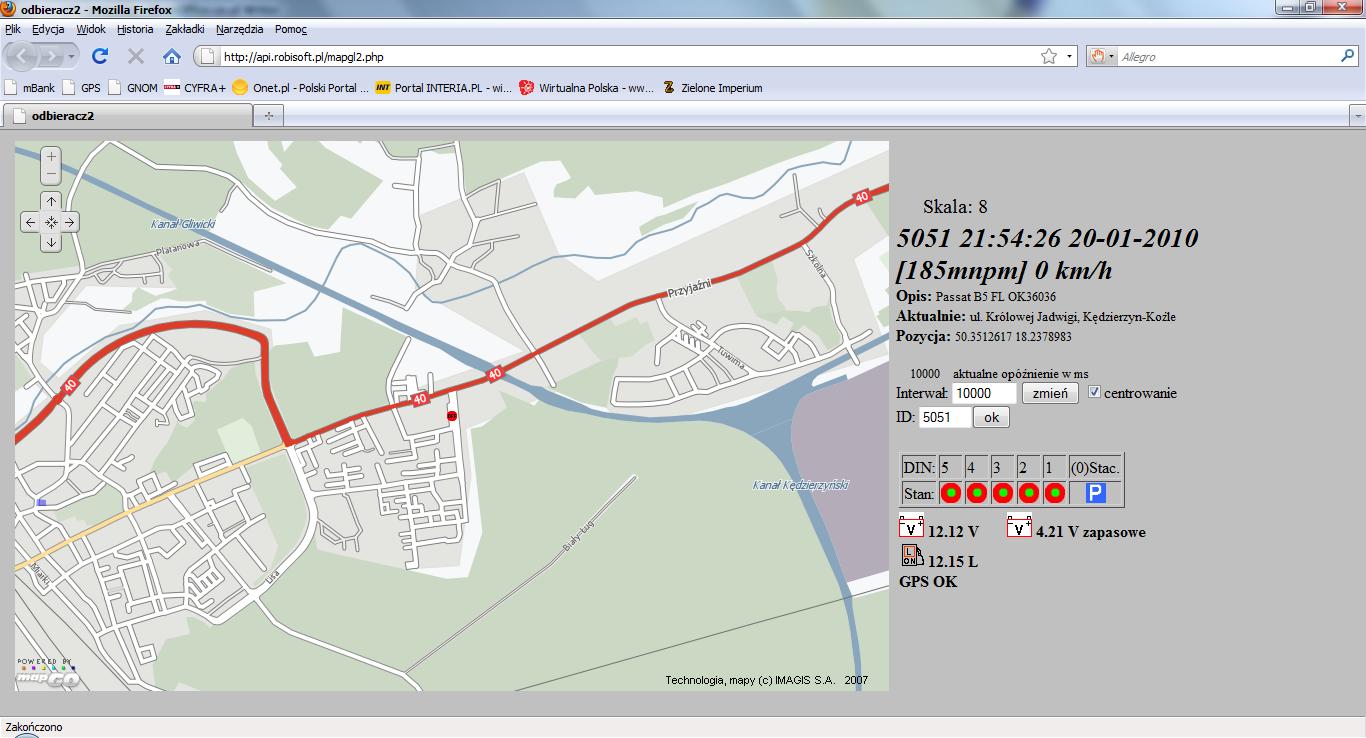
Lokalizacja monitorowanych obiektów jest prezentowana na mapach cyfrowych wykonanych w technice wektorowej. Możliwe jest zarówno monitorowanie w czasie rzeczywistym, jak i przeglądanie historii wykonanych tras.
Oprócz lokalizacji wizualizowane są następujące elementy:
prędkość chwilowa pojazdu,
stan stacyjki – włączona/wyłączona,
stany pracy urządzeń zamontowanych w pojeździe
Moduł wizualizacji pozwala na dowolną konfigurację zakresu prezentowanych danych (umożliwia monitorowanie zarówno pojedynczych obiektów jak i całej floty jednocześnie).
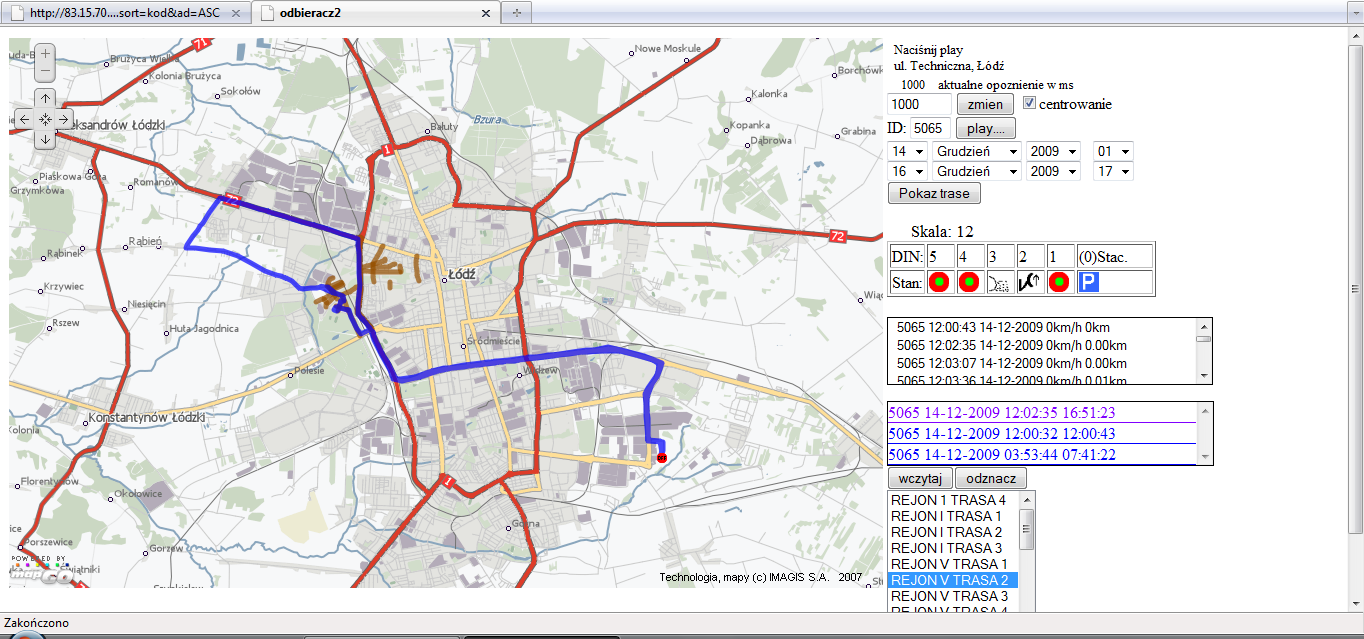
Moduł rejestruje wszystkie informacje o wykonywanych trasach i udostępnia zarówno podgląd na trasę na mapie jak i informacje statystyczne trasy.
Moduł gromadzi i udostępnia następujące informacje:
zakres dat, w których trasa miała miejsce,
ilość przejechanych kilometrów,
prędkość max.,
dane opisujące pracę urządzeń zamontowanych w pojazdach.
planowanie tras oraz ich pokazanie na mapie
Moduł udostępnia zestaw raportów obejmujących eksploatację pojazdów, czas pracy kierowcy:
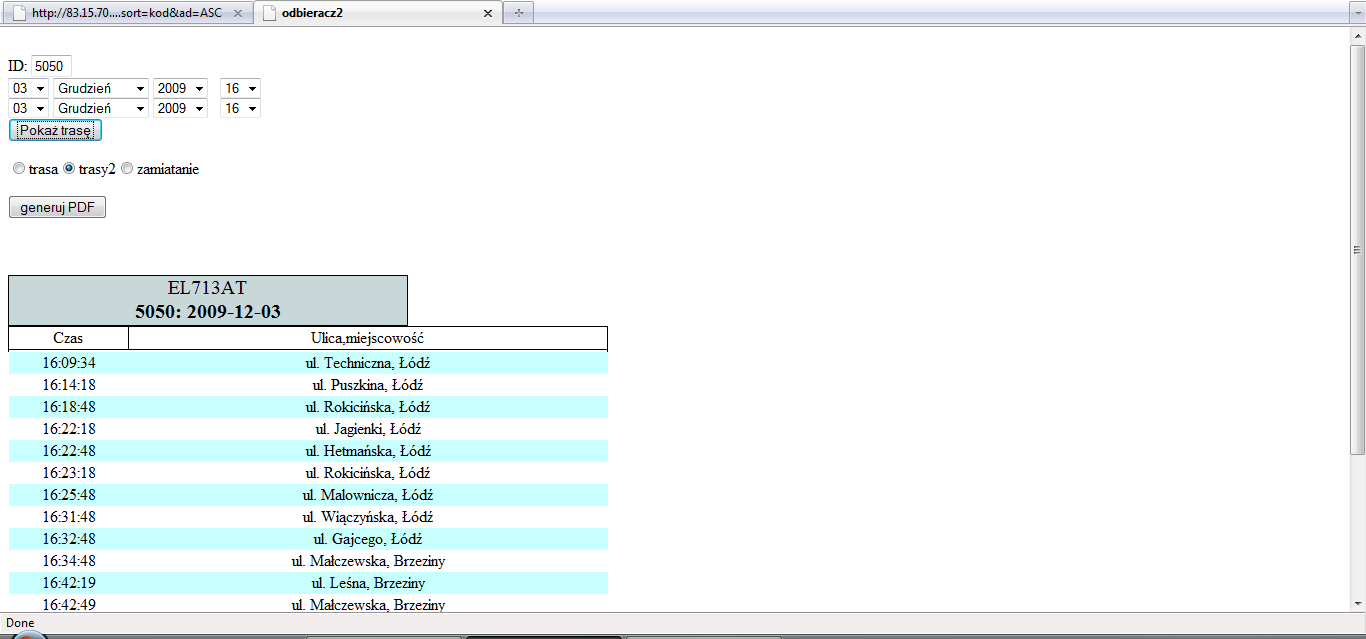
raport z przejechanych tras oraz czasów postoju (raport poglądowy)
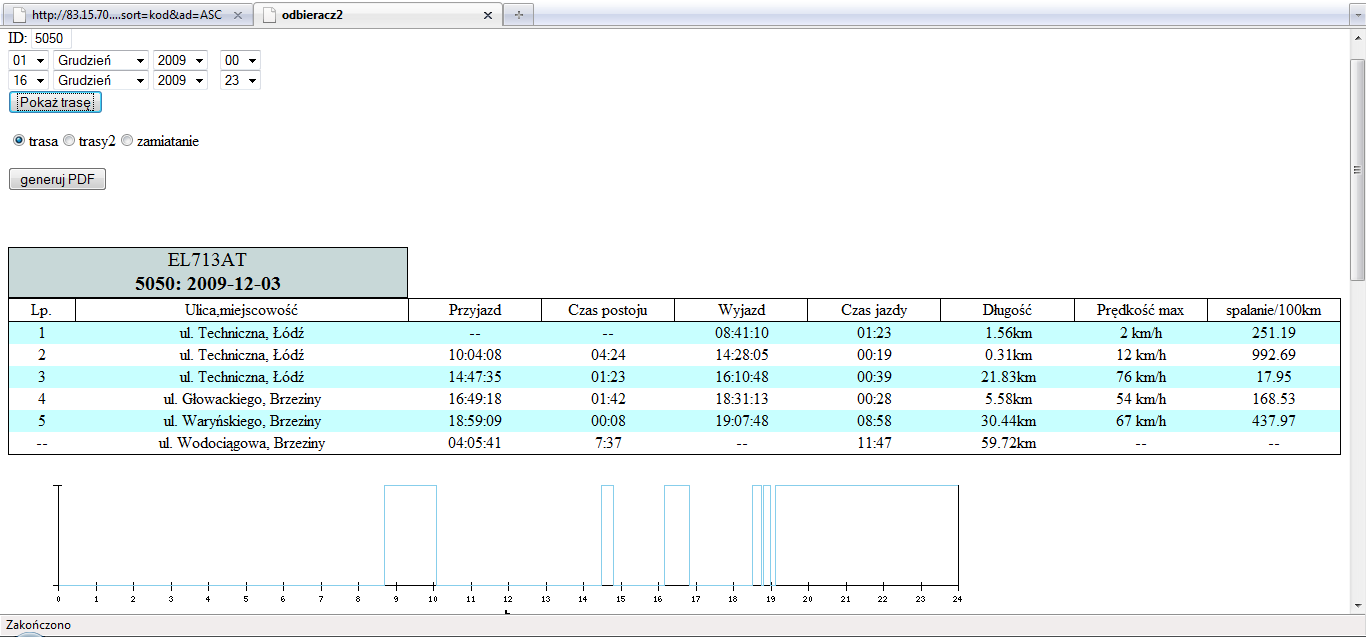
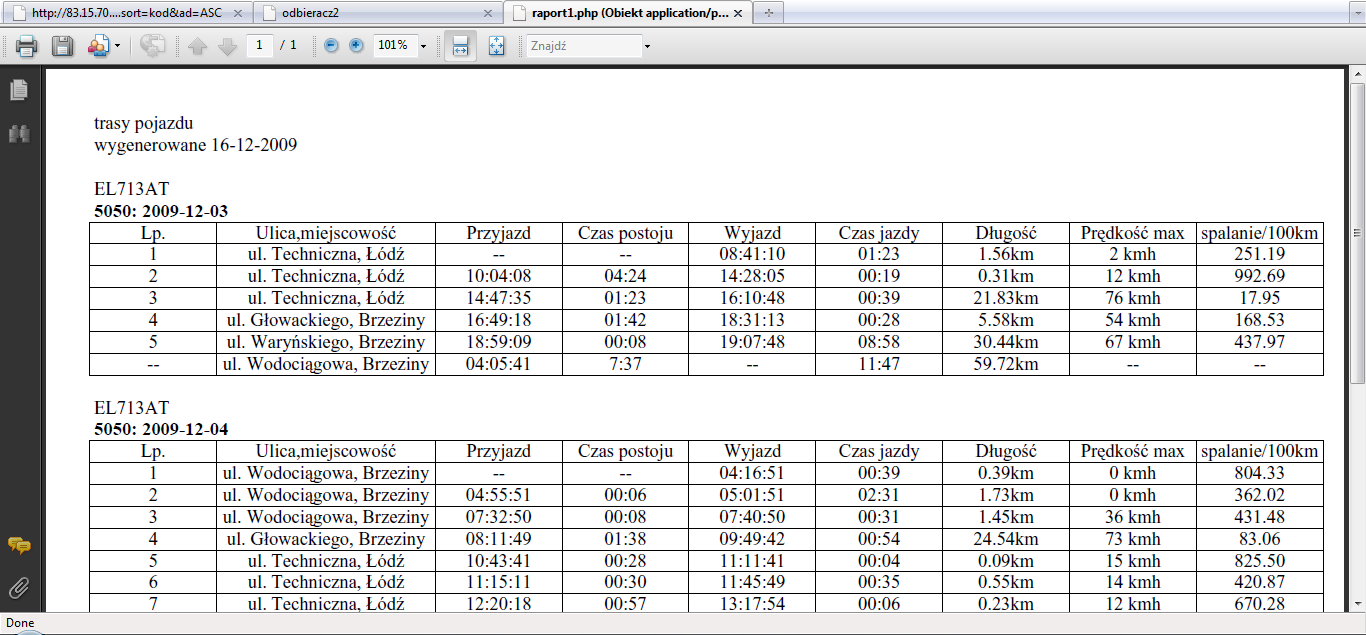
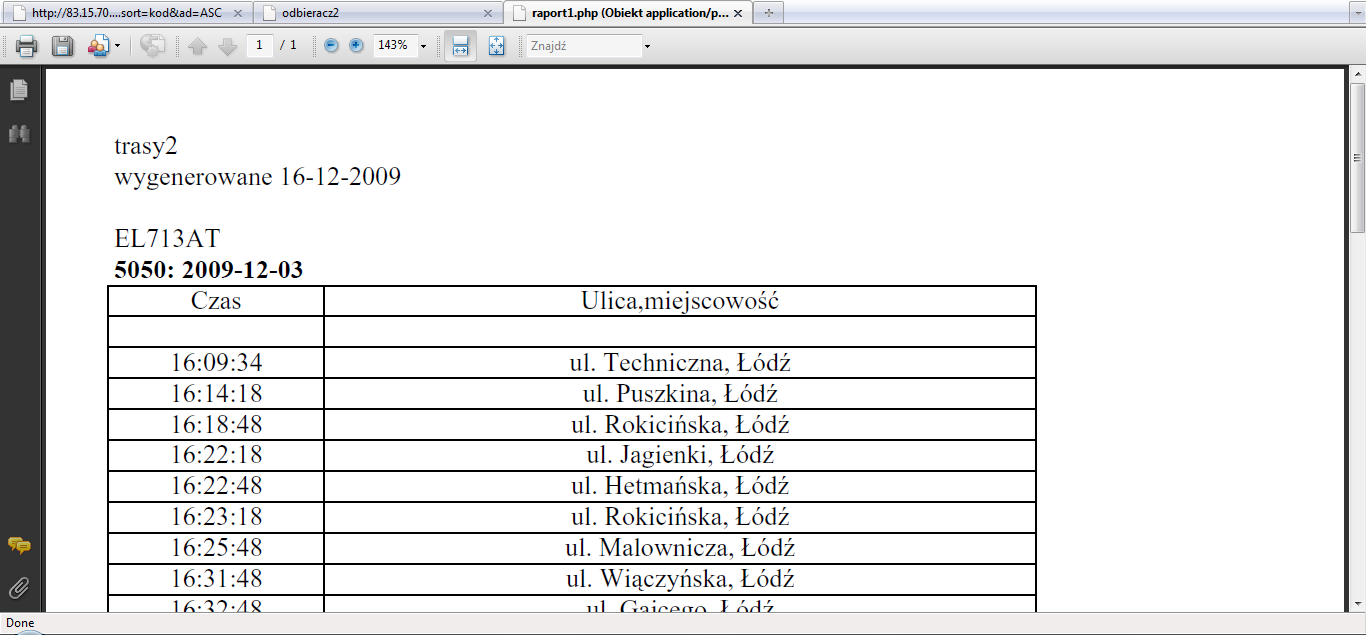
raport w formacie PDF
raport dokładny z przejechanych tras z dokładną marszrutą przejazdu ulica po ulicy (raport poglądowy)
raport w formacie PDF
raport z czynności wykonywanych przez pojazd (stany różnych zamontowanych czujników)
raport z zużycia paliwa tankowań oraz ubytków paliwa.

Raporty zarówno w sposób tekstowy jak i graficzny prezentują zgromadzone w systemie dane oraz umożliwiają wykonanie wydruku na drukarce jak też zapis i odczyt do i z pliku.
Dostęp do systemu wymaga autoryzacji. Hasła użytkowników przechowywane są w bazie w sposób zakodowany (nieodwracalny). System umożliwia dodawanie nowych użytkowników oraz nadawanie im różnych uprawnień. Główny użytkownik może wybrać jakie opcje może widzieć użytkownik o mniejszych uprawnieniach. Na życzenie klienta istnieje możliwość indywidualnego dostosowania aplikacji zależnie od potrzeb.
Sprzęt:
Urządzenie AWIA Locator LC stanowi samodzielny
odbiornik GPS, umożliwiający określenie położenia
obiektu i parametrów jego ruchu oraz dostarczający te
informacje do centrum nadzoru. Zakres danych
przesyłanych z modułu do centrum nadzoru poprzez
sieć GSM jest następujący:
- Współrzędne geograficzne obiektu
- Wysokość obiektu nad poziomem morza
- Prędkość chwilowa obiektu
- Data i godzina pomiaru
- Liczba widzianych satelitów
- Stan odbiornika
- Jakość sygnału
- Stan przycisku napadowego
- Stan stacyjki (włączona/wyłączona)
-
Informacje o braku zasilania modułu
- Zużycie paliwa
- Identyfikacja kierowcy
- Obroty silnika
- Napięcie akumulatora
- Nieautoryzowane wtargnięcie do samochodu
- Ingerencja w instalację pojazdu
- Diagnostyka elementów pojazdu i silnika
Częstotliwość przesyłania informacji z modułu AWIA
Locator LC do Centrum Nadzoru może być
parametryzowana w zależności od potrzeb.
Dodatkowo można niezależnie od interwału
czasowego ustalić dystans, po przebyciu którego
wysyłana jest informacja o aktualnej pozycji obiektu.
Informacje o stanie technicznym pojazdu mogą być
odczytywane z dodatkowych czujników instalowanych
w pojeździe, bądź z wykorzystaniem fabrycznej
magistrali CAN pojazdu. W przypadku braku sygnałów
do transmisji danych, system zapisuje wszystkie
monitorowane parametry w pamięci urządzenia
(pamięć FLASH), a po uzyskaniu dostępu do medium
transmisyjnego, przesyła wszystkie zgromadzone
dane.
Podstawowe parametry techniczne:
Pasmo transmisji danych GSM 900/DCS 1800/PCS 1900
transmisja danych GPRS
wysyłanie i odbiór komunikatów tekstowych SMS
globalny system pozycjonowania GPS/DGPS
dokładność lokalizacji obiektu GPS: 2,5m CEP; 5m SEP
DGPS: 2m CEP; 3m SEP
interwał czasowy transmisji danych (programowalny) 5 ÷ 32768 s
pojemność wewnętrznej pamięci FLASH 2 GB
nominalne napięcie zasilania +12 VDC lub +24 VDC
dopuszczalny przedział napięcia +8 ÷ +35 VDC
max. pobór prądu podczas ładowania baterii wew. 450 mA
max. pobór prądu przy wyłączonym ładowaniu baterii 75 mA
nominalny średni pobór prądu 50 mA
liczba wejść analogowych do pomiaru napięcia 2
liczba dodatkowych wejść dwustanowych 4
liczba dodatkowych wejść impulsowych 2
liczba dodatkowych dwustanowych wyjść typu OC 3
interfejsy komunikacyjne RS485, RS485-2, USB device, USB host, CAN x 2,
WIFI lub Bluetooth
stopień szczelności Ip40
temperatura pracy -40 ÷ +85 °C
wymiary: szerokość/wysokość/głębokość 114 x 78 x 32 mm
waga 180g
akumulator podtrzymujący (Li-Ion lub Li-Poly) 3,6 V / 650 ÷ 1800 mAh
Certyfikacja:
- Świadectwo Homologacji typu WE Ministerstwa Infrastruktury na zgodność z
dyrektywą 2004/104/WE
- Zgodność z wymaganiami normy PN-S-76020:1997 -Pojazdy drogowe. Urządzenie
elektroniczne pojazdów samochodowych. Ogólne wymagania i metody badań
-E20 oraz CE
Dodatkowe wyposażenie (Opcjonalnie):
Skaner kodów kreskowych Motorola:
|
|
Sonda paliwowa:
|
|
Ultradźwiękowa sonda pomiaru poziomu paliwa typu UMPP-1a przeznaczona jest do pomiaru ilości oleju napędowego w zbiornikach pojazdów samochodowych. Pomiar poziomu dokonywany jest impulsowo z zastosowaniem ultradźwięków o bardzo dużej częstotliwości. Sonda paliwowa - nazywana przez instalatorów " sonda perpetum " - nie posiada ruchomych elementów mechanicznych. Urządzenie może być instalowane na zbiornikach dowolnego typu. Znakomicie nadaje się do pomiaru poziomów paliwa dla systemów nadzoru GPS. Informacją wyjściową jest standaryzowany sygnał analogowy 0_10 V. Sygnał wyjściowy jest proporcjonalny do zakresu pomiarowego dla którego została wykonana sonda. Opcjonalnie klient może zamówić sondę z wyjściem 0_5 V, podany zakres napięć wyjściowych obowiązuje dla sondy zasilanej napięciem 10 - 15 V DC. Sondy wykonywane są dla zakresów pomiarowych: 400*, 600*, 800, 1000, 1200, 1500 [ mm ]. Widoczna na rysunku rurka wzorcowa - el. nr 5 - zapewnia sondzie dużą dokładność pomiaru niezależną od zmian temperatury, gęstości i ciśnienia. Zastosowane w sondzie elementy z tworzyw sztucznych posiadają wysoką odporność na czynniki chemiczne występujące w oleju napędowym. Sonda paliwowa jest wyposażona w filtr siatkowy w postaci rękawa nakładanego na przetwornik ultradźwiękowy. Sonda UMPP-1a posiada własny wzorzec długości, takie rozwiązanie pozwala na prowadzenie bardzo dokładnych pomiarów. Własny wzorzec to 100% kompensacja od zmian temperatury i zmian gęstości ( ciężaru właściwego ). W efekcie sonda podaje wiarygodny pomiar bez względu na zastosowane paliwo: olej napędowy czy też bio paliwo o dowolnej proporcji składników - w odróżnieniu od sond ciśnieniowych, które nie uwzględniają zmieniającej się gęstości paliwa. |

